Orientation Sensor
The orientation sensor component records the orientation of an entity. Please see the API documentation for more details.
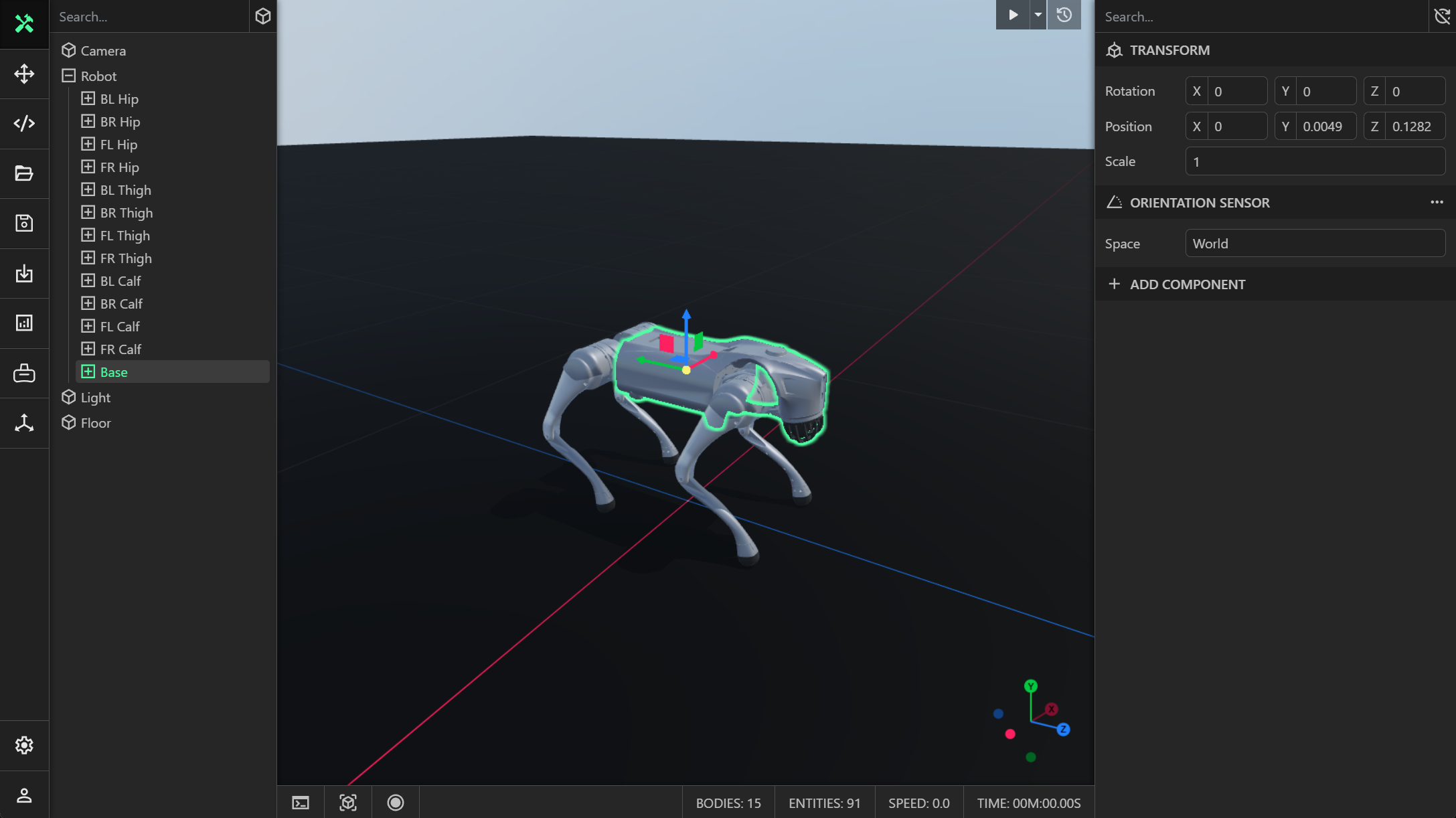
Properties
The orientation sensor component properties that are accessible through the inspector.
Space
The coordinate system for the reported orientation is one of the following values:
- Local: Local space.
- World: World space.
IO
The IO signals for the orientation sensor component. Please see the OrientationSensorIO API documentation for more details.
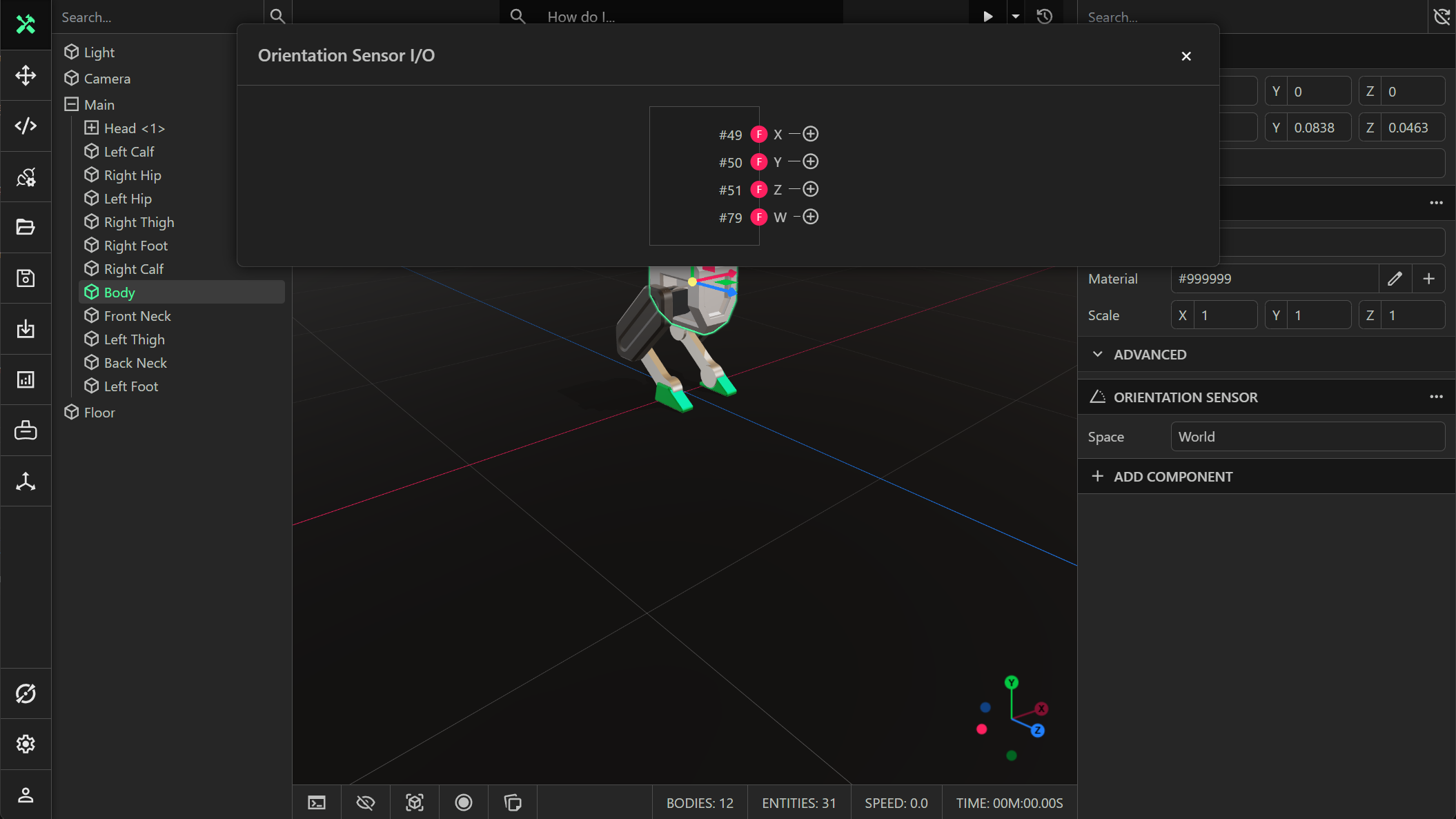
x
A readable (output) signal that stores the quaternion x-coordinate.
y
A readable (output) signal that stores the quaternion y-coordinate.
z
A readable (output) signal that stores the quaternion z-coordinate.
w
A readable (output) signal that stores the quaternion w-coordinate.